LLRFLibsPy库中loop_analysis函数解读
source code: Github
loop_analysis 函数用于分析控制回路的特性,包括开环传递函数的推导、灵敏度函数和互补灵敏度函数的计算。该函数可以处理连续系统(Ts为None)和离散系统(Ts有一个非零的浮点值)。以下是对该函数的详细解释:
函数参数:
AG, BG, CG, DG: numpy矩阵(复数),表示被控对象(Plant)模型的状态空间矩阵。AK, BK, CK, DK: numpy矩阵(复数),表示控制器的状态空间矩阵。Ts: 浮点数,采样时间,单位为秒。如果为None,则为连续系统。delay_s: 浮点数,回路延迟时间,单位为秒。plot: 布尔值,是否绘制波德图和奈奎斯特图。plot_pno: 整数,绘图的点数。plot_maxf: 浮点数,要绘制的最大频率范围,单位为赫兹。label: 字符串,绘图时的标签。
返回值:
status: 布尔值,表示函数执行是否成功。S_max: 浮点数,最大灵敏度,单位为dB。T_max: 浮点数,最大互补灵敏度,单位为dB。
函数流程:
检查输入参数:
确保plot_pno、plot_maxf和delay_s有合理的默认值。如果定义了Ts,则确保其为正值。采样频率设定:
如果Ts为None,则该系统为连续系统,设定采样频率为1。如果Ts不为None,则采样频率fs为1.0/Ts。级联Plant和控制器得到开环传递函数:
使用ss_cascade函数将Plant和控制器级联,得到开环传递函数L的状态空间表示(AL, BL, CL, DL)。如果级联失败,返回失败状态。计算开环传递函数的频率响应:
使用ss_freqresp函数计算开环传递函数L的频率响应,得到频率响应result_L。如果计算失败,返回失败状态。应用延迟到开环传递函数:
频率响应L乘以一个包含延迟的复指数因子,以考虑回路中的延迟。计算灵敏度和互补灵敏度函数:
- 灵敏度
S:S = 1 / (1 + L) - 互补灵敏度
T:T = 1 - S
- 灵敏度
绘图:
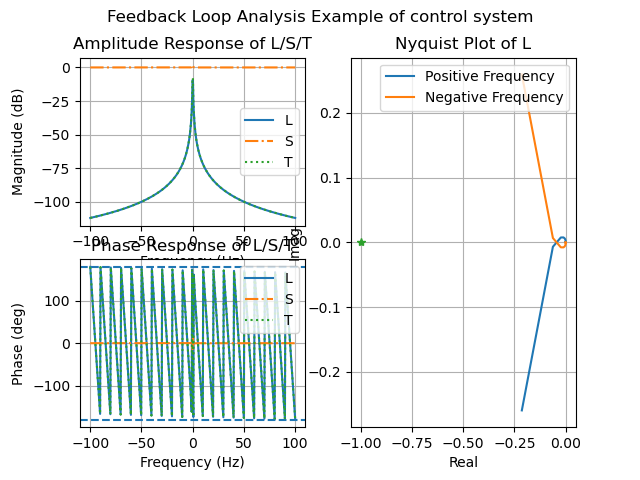
如果plot为True,调用rf_plot模块中的plot_loop_analysis函数来绘制频率响应图,包括奈奎斯特图和波德图。计算灵敏度和互补灵敏度的峰值:
计算灵敏度和互补灵敏度的最大值,单位是dB。返回结果:
返回函数执行状态True,以及最大灵敏度S_max和最大互补灵敏度T_max。
总结:
loop_analysis函数是一个用于分析控制回路特性的重要工具。通过计算和绘制控制系统的开环传递函数、灵敏度和互补灵敏度,可以帮助工程师评估系统的稳定性和性能。
示例:
1 | import numpy as np |
示例说明:
- 状态空间矩阵:
AG,BG,CG,DG是系统的状态空间矩阵,AK,BK,CK,DK是控制器的状态空间矩阵。这里已经用简单的例子进行了定义。 - 采样时间:设置为
None代表连续系统。如果你有离散系统,请设定合适的采样时间。 - 延迟时间:设定为
0.1秒。 - 绘图参数:你可以设置是否绘图,绘图的点数,以及绘制的最大频率范围。
- 标签:你可以自定义标签以便于识别不同的系统。
1 | 最大灵敏度 S_max: 1.6351098604869219 dB |
运行这段代码后,如果loop_analysis函数执行成功,将会打印出最大灵敏度和最大互补灵敏度的值,并且会绘制出相应的频率响应图。